PC软件无法在手机上运行,请前往碧蓝下载站电脑版下载
这款PhotoMetric软件是一个专门为无人机数据后处理的软件,支持对无人机拍摄的影像与测绘数据进行处理,生成4D产品,支持配置服务器与硬盘,方便用户更好的处理拍摄数据,ouyaoxiazai提供PhotoMetric安装方法、使用方法,欢迎参考。
1、真正射,无变形
2、自校验,多线程并行计算
3、生产多种三维点云
4、简单方便,全自动化
5、显著提升处理速度,特定项目准实时
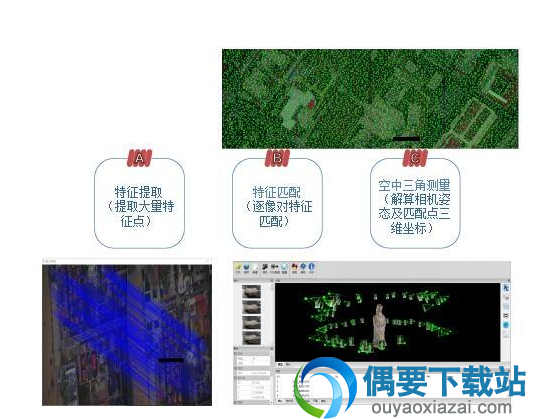
1、特征提取。提取每张影像上的纹理特征
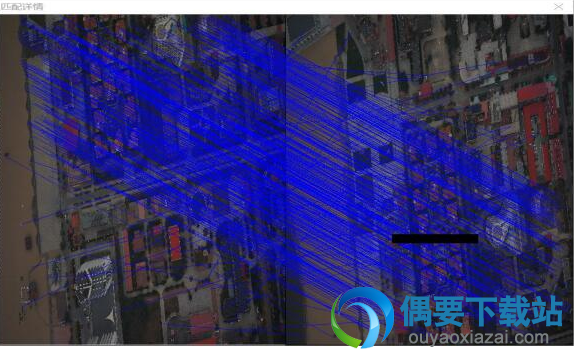
2、影像匹配。全自动对影像进行特征匹配,生成密集匹配关系
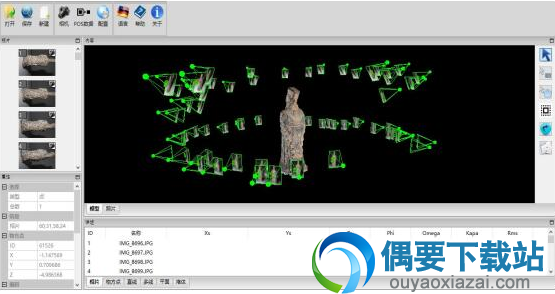
3、空间三角测量。计算相机方位,匹配点坐标
4、坐标转换。根据控制点三维坐标,将坐标系转到地方坐标系
5、密集点云、三角网、等高线、数字高程模型DEM、正射影像DOM、数字线划图等产品生成
1、运行PhotoMetric安装程序,选择安装语言
2、选择PhotoMetric软件安装路径,点击下一步
3、选择开始菜单文件夹,点击下一步
4、选择附带任务,点击下一步
5、点击安装按钮,等待PhotoMetric软件安装完成即可
1、使用PhotoMetric软件处理工程的流程如下所示,分别为空三定向、坐标转化、密集匹配、三角网打造与产品生成。

1、空三定向
空三定向流程主要对相片进行多种分析、提取、计算,完成从影像到空间、从图像到数据的过程,得到初步的点云数据。空三定向流程主要分为三个步骤:特征提取、特征匹配与空三。
1)纹理提取
纹理提取是指对相片原始图像建立影像金字塔,对所述影像金字塔中的每一层影像计算响应值,并确定特征点方向以生成特征点描述。
2)影像匹配
影像匹配是指根据对于所述特征提取步骤中的特征点进行抽稀形成强特征点,根据设置好的像对关系,对所述强特征点进行匹配,匹配生成的一致点,运用在平面三角网上内插视差的方法求初始左右视差及左右影像初始匹配坐标。
3)空三定向
空三定向是指,通过将之前匹配的结果,通过一系列方法计算,将每个像对形成的模型与坐标系,统一在一个整体的模型与坐标系下,确定相机与特征点在该坐标系下的位置、姿态与坐标。
2、坐标转化
1)控制点管理
控制点管理,是在影像及点云中选择设置好在拍摄相片前预设的标靶或标识点,通过一系列的操作及计算,完成对点云数据的坐标转换及误差评定。

2)像控点量测(比例棒管理)
影像控制点选中,用鼠标点选该控制点在相片显示区中各相片中位置坐标已知的标靶或标识点,点选完成后点击确定就OK了。

而后根据选中的影像控制点,根据两点间的距离,设置比例棒。
3)光束法平差
光束法平差是使用光束法区网平差原理精确解算测区内所有影像外方位元素与模型点空间坐标,并将全部影像在统一模型与坐标系下进行整体平差。
3、密集匹配
点云处理是指对点云进行多种操作,达到对点云数据的加密、构网、贴图。这个过程主要由加密匹配、三角网打造、纹理
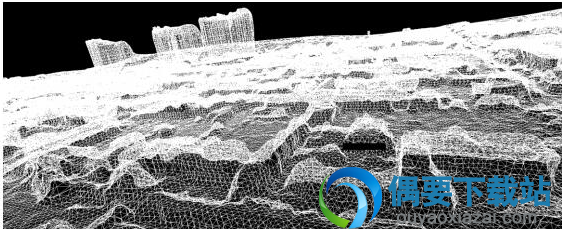
1)加密匹配
加密匹配是指在现有的点云数据的基础上,进行多种计算处理,实现点云数据的像素级加密工作。
完成加密匹配后,可以在相片显示区与3D显示区观察到处理后的结果,处理后的结果图下图可供参考所示:
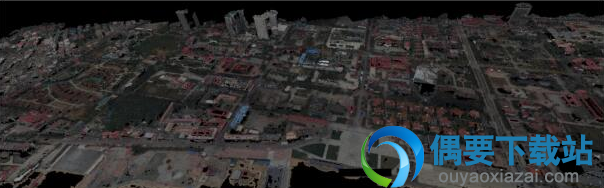

4、三角网
在获得密集点云后,小伙伴们可以在密集点云的基础上,构成相应的三角网与相应的三维模型。


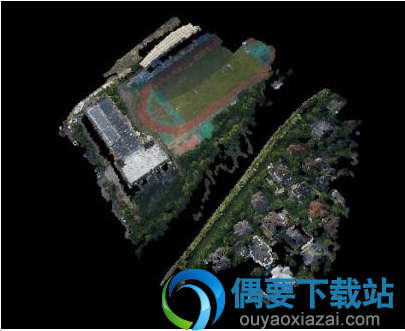
5、产品生成
使用PhotoMetric软件可以获得相应的产品成果包含:点线面体的量测功能、等高线、数字高程模型DEM、正射影像DOM、数字线画图DLG等。
PhotoMetric 无人机数据处理软件功能强大,使用简单,全自动化的特性深受广大用户的青睐,有对这款软件感兴趣的小伙伴们快来免费下载使用吧!